汽车驾驶自动化术语与定义
1、驾驶自动化(driving automation):车辆以自动的方式持续地执行部分或全部动态驾驶任务的行为;
2、驾驶自动化系统(driving automation system):由实现驾驶自动化的硬件和软件所共同组成的系统;
3、驾驶自动化功能(driving automation feature):驾驶自动化系统在特定的设计运行条件内执行部分或全部动态驾驶任务的能力。
注:一个驾驶自动化系统可实现一个或多个驾驶自动化功能,每个功能与具体的驾驶自动化等级和设计运行条
件关联。为了准确描述驾驶自动化功能(5 级除外),需要同时明确其驾驶自动化等级和设计运行条件;
4、动态驾驶任务(dynamic driving task):除策略性功能外,完成车辆驾驶所需的感知、决策和执行等行为,包括但不限于:
——车辆横向运动控制;
——车辆纵向运动控制;
——目标和事件探测与响应;
——驾驶决策;
——车辆照明及信号装置控制。
注 1:策略性功能包括导航功能,如行程规划、目的地和路径的选择等任务。
注 2:动态驾驶任务包括所有实时操作和决策功能,由驾驶员或驾驶自动化系统完成,或由两者共同完成;
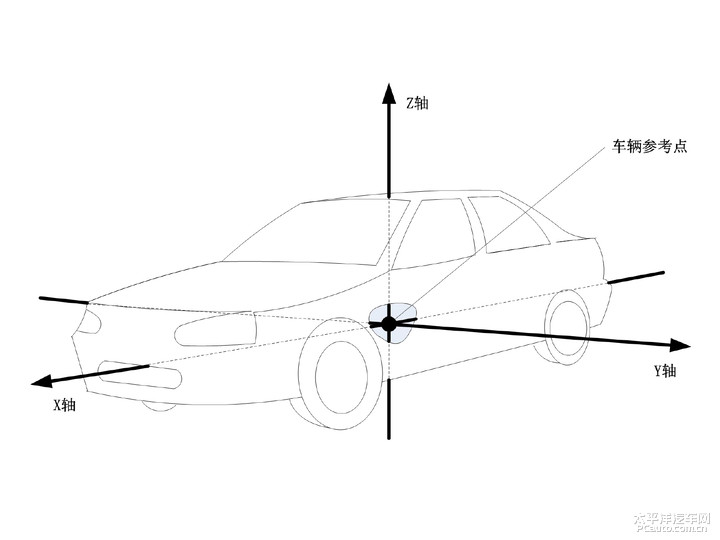
5、车辆横向运动控制(lateral vehicle motion control):动态驾驶任务中沿着 Y 轴实时、持续的车辆运动控制;
6、车辆纵向运动控制(longitudinal vehicle motion control):动态驾驶任务中沿着 X 轴实时、持续的车辆运动控制;
7、目标和事件探测与响应(object and event detection and response):对目标和事件进行探测,并进行适当的响应;
8、最小风险状态(minimal risk condition):当车辆无法完成预定的行程时,由用户或驾驶自动化系统执行并最终使车辆事故风险达到可接受的状态;
9、动态驾驶任务接管(dynamic driving task fallback):当发生驾驶自动化系统失效、车辆其他系统失效或即将不满足设计运行条件时,由用户执行动态驾驶任务或由用户/驾驶自动化系统使车辆达到最小风险状态的行为;
10、设计运行范围(operational design domain):设计时确定的驾驶自动化功能的本车状态和外部环境,
注:设计运行范围包括速度、道路、交通、天气、光照等;
11、设计运行条件(operational design condition):设计运行时确定的驾驶自动化功能可以正常工作的条件,包括设计运行范围、驾驶员状态以及其他必要条件;
12、接管请求(request to intervene):驾驶自动化系统请求用户执行动态驾驶任务接管的通知;
13、驾驶自动化系统失效(driving automation system failure):驾驶自动化系统发生故障导致其无法可靠地执行部分或全部动态驾驶任务(如:传感器故障等);
14、车辆其他系统失效(other vehicle system failure):驾驶自动化系统之外的车辆其他系统发生故障导致驾驶自动化系统无法可靠地执行部分或全部动态驾驶任务(如:车辆悬架部件断裂等);
15、风险减缓策略(risk mitigation strategy):在驾驶自动化系统或用户无法执行动态驾驶任务或动态驾驶任务接管时,驾驶自动化系统所采取的降低风险的措施(如:车道内停车等);
16、用户(user):与驾驶自动化相关的人类角色的统称;
注:用户的角色可以在特定的条件下进行转换;
驾驶员(driver):对于某个具体的车辆,实时执行部分或全部动态驾驶任务和/或动态驾驶任务接管的用户;
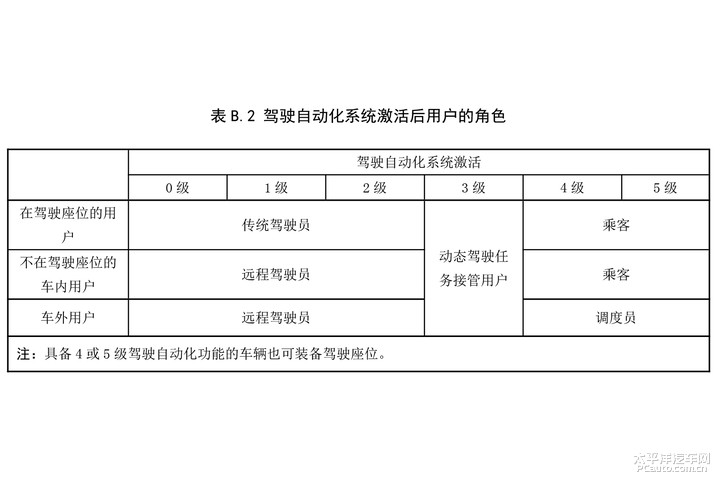
传统驾驶员(conventional driver):坐在驾驶座位上,以人工方式直接操作车辆制动、加速、转向和换挡等操纵装置对车辆进行控制的驾驶员;
远程驾驶员(remote driver):不在可以手动直接操作车辆制动、加速、转向和换挡等操纵装置的驾驶座位上,仍可以实时操纵车辆的驾驶员;
注:远程驾驶员可以是车内的用户、车辆在其视野范围内的用户或车辆在其视野范围外的用户;
乘客(passenger):在车内,但不承担任何动态驾驶任务和动态驾驶任务接管的用户;
动态驾驶任务接管用户(DDT fallback-ready user):当 3 级驾驶自动化系统工作时,可以识别驾驶自动化系统发出的接管请求和明显的动态驾驶任务相关的车辆故障,并执行动态驾驶任务接管的用户;
注 1:该术语适用于 3 级驾驶自动化功能,4 级和 5 级没有这个角色。动态驾驶任务接管用户可以在车内或车外;
注 2:动态驾驶任务接管用户在执行部分或全部动态驾驶任务时成为驾驶员;
调度员(dispatcher):在车辆无驾驶员操作的条件下,通过激活驾驶自动化系统以实现车辆调度服务但不执行动态驾驶任务的用户;
注:装备有 4 级和 5 级驾驶自动化功能,且其设计运行条件覆盖整个行程的车辆才可被调度。如果驾驶自动化系统未规划线路,调度员还需要指定目的地;
直观了解汽车驾驶辅助级别
目前,全球广泛采用的是由SAE International(国际汽车工程师协会)制定的划分方法,按照分级标准,自动驾驶从L0至L5总共被分为6个级别,L0代表没有自动驾驶的传统人类驾驶,L1至L5则随自动驾驶的成熟程度进行了进一步分级;

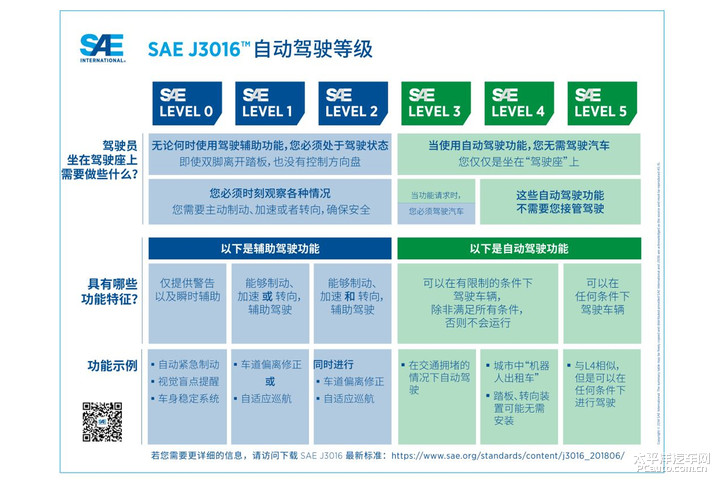
下面,一起来了解一下自动驾驶的等级划分:
L0级:这就是完全由驾驶员进行操作驾驶的,包括转向、制动、油门等均由驾驶员进行自行判断,汽车只负责命令的执行。
L1级:能够辅助驾驶员完成某些驾驶的任务,例如许多车型装配的自适应巡航(ACC)功能,雷达实时监控车辆之间的距离和车辆的加减速,在国内的很多车型上都有广泛应用。
L2级:可以自动完成某些驾驶任务,并且通过处理分析,自动调整车辆的状态,例如特斯拉的车道保持功能就属于此级别,除了能控制加减速,同时还能对方向盘进行控制,驾驶员需要观察周围情况提供车辆安全操作。
L3级:该级别通过更有逻辑性的行车电脑控制车辆,驾驶员不需要手脚待命,车辆能够在特定的环境下独立完成操作驾驶,但是驾驶员无法进行睡眠或休息,在人工智能不能准确判断时,仍然需要人工介入操作。例如宝马X7自称已实现这一技术层面的自动驾驶了。

L4级:车辆能够自动做出自主决策,并且驾驶者无需任何操作,一般需要依靠可实时更新的道路信息数据支持,实现自动取还车、自动编队巡航、自动避障等出行的真实场景。
L5级:与L4级别最大的区别是完全不需要驾驶员配合任何操作,实现全天候、全地域的自动驾驶,并能应对环境气候及地理位置的变化,驾驶员可将注意力放在休息或其它工作上。
汽车驾驶自动化分级
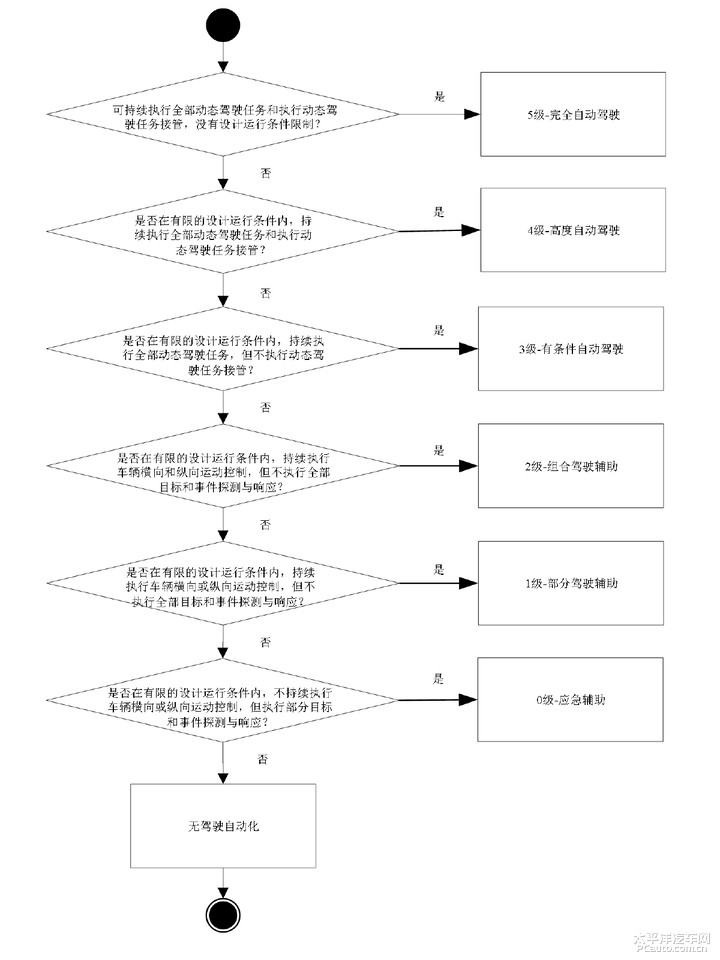
1、驾驶自动化分级原则:基于驾驶自动化系统能够执行动态驾驶任务的程度,根据在执行动态驾驶任务中的角色分配以及有无设计运行条件限制,将驾驶自动化分成 0~5 级;
2、驾驶自动化等级划分要素:基于如下 5 个要素对驾驶自动化等级进行划分:
——驾驶自动化系统是否持续执行动态驾驶任务中的车辆横向或纵向运动控制;
——驾驶自动化系统是否同时持续执行动态驾驶任务中的车辆横向和纵向运动控制;
——驾驶自动化系统是否持续执行动态驾驶任务中的目标和事件探测与响应;
——驾驶自动化系统是否执行动态驾驶任务接管;
——驾驶自动化系统是否存在设计运行条件限制;
3、驾驶自动化等级划分:
a、L0 级驾驶自动化(应急辅助)
驾驶自动化系统不能持续执行动态驾驶任务中的车辆横向或纵向运动控制,但具备持续执行动态驾驶任务中的部分目标和事件探测与响应的能力。
注 1:L0 级驾驶自动化不是无驾驶自动化,0 级驾驶自动化可感知环境,并提供报警、辅助或短暂介入以辅助驾驶员(如车道偏离预警、前碰撞预警、自动紧急制动等应急辅助功能)。
注 2:不具备目标和事件探测与响应的能力的功能(如:定速巡航、电子稳定性控制等)不在驾驶自动化考虑的范围内;
b、L1 级驾驶自动化(部分驾驶辅助)
驾驶自动化系统在其设计运行条件内持续地执行动态驾驶任务中的车辆横向或纵向运动控制,且具备与所执行的车辆横向或纵向运动控制相适应的部分目标和事件探测与响应的能力。
注:对于 L1 级驾驶自动化,驾驶员和驾驶自动化系统共同执行动态驾驶任务,并监管驾驶自动化系统的行为和执行适当的响应或操作;
c、L2 级驾驶自动化(组合驾驶辅助)
驾驶自动化系统在其设计运行条件内持续地执行动态驾驶任务中的车辆横向和纵向运动控制,且具备与所执行的车辆横向和纵向运动控制相适应的部分目标和事件探测与响应的能力。
注:对于L2级驾驶自动化,驾驶员和驾驶自动化系统共同执行动态驾驶任务,并监管驾驶自动化系统的行为和执行适当的响应或操作;
d、L3 级驾驶自动化(有条件自动驾驶)
驾驶自动化系统在其设计运行条件内持续地执行全部动态驾驶任务。
注:对于 L3 级驾驶自动化,动态驾驶任务接管用户以适当的方式执行动态驾驶任务接管;
e、L4 级驾驶自动化(高度自动驾驶)
驾驶自动化系统在其设计运行条件内持续地执行全部动态驾驶任务和执行动态驾驶任务接管。
注:对于 L4 级驾驶自动化,系统发出接管请求时,若乘客无响应,系统具备自动达到最小风险状态的能力;
f、L5 级驾驶自动化(完全自动驾驶)
驾驶自动化系统在任何可行驶条件下持续地执行全部动态驾驶任务和执行动态驾驶任务接管。
注1:对于5级驾驶自动化,系统发出接管请求时,乘客无需进行响应,系统具备自动达到最小风险状态的能力。
注2:L5级驾驶自动化在车辆可行驶环境下没有设计运行条件的限制(商业和法规因素等限制除外);
4、驾驶自动化等级划分流程及判定方法:根据 3.2 驾驶自动化等级划分要素和图 2 所示流程进行驾驶自动化等级划分和判定;
5、驾驶自动化各等级技术要求:
a、L0 级驾驶自动化(应急辅助)
L0 级驾驶自动化系统应满足以下要求:
1) 具备持续执行部分目标和事件探测与响应的能力;
2) 当驾驶员请求驾驶自动化系统退出时,立即解除系统控制权;
b、L1 级驾驶自动化(部分驾驶辅助)
L1 级驾驶自动化系统应满足以下要求:
1) 持续地执行动态驾驶任务中的车辆横向或纵向运动控制;
2) 具备与车辆横向或纵向运动控制相适应的部分目标和事件探测与响应的能力;
3) 当驾驶员请求驾驶自动化系统退出时,立即解除系统控制权;
c、L2 级驾驶自动化(组合驾驶辅助)
L2 级驾驶自动化系统应满足以下要求:
1) 持续地执行动态驾驶任务中的车辆横向和纵向运动控制;
2) 具备与车辆横向和纵向运动控制相适应的部分目标和事件探测与响应的能力;
3) 当驾驶员请求驾驶自动化系统退出时,立即解除系统控制权;
d、L3 级驾驶自动化(有条件自动驾驶)
L3 级驾驶自动化系统应满足以下要求:
1) 仅允许在设计运行条件内激活;
2) 激活后在设计运行条件内执行全部动态驾驶任务;
3) 识别是否即将不满足设计运行条件,并在即将不满足设计运行条件时,及时向动态驾驶任务接管用户发出接管请求;
4) 识别驾驶自动化系统失效,并在发生驾驶自动化系统失效时,及时向动态驾驶任务接管用户发出接管请求;
5) 识别动态驾驶任务接管用户的接管能力,并在用户的接管能力即将不满足要求时,发出接管请求;
6) 在发出接管请求后,继续执行动态驾驶任务一定的时间供动态驾驶任务接管用户接管;
7) 在发出接管请求后,如果动态驾驶任务接管用户未响应,适时执行风险减缓策略;
8) 当用户请求驾驶自动化系统退出时,立即解除系统控制权;
e、L4 级驾驶自动化(高度自动驾驶)
L4 级驾驶系统化系统应满足以下要求:
1) 仅允许在设计运行条件内激活;
2) 激活后在设计运行条件内执行全部动态驾驶任务;
3) 识别是否即将不满足设计运行条件;
4) 识别驾驶自动化系统失效和车辆其他系统失效;
5) 在发生下列情况之一时,执行动态驾驶任务接管并自动达到最小风险状态:
——即将不满足设计运行条件;
——驾驶自动化系统失效或车辆其他系统失效;
——用户未响应接管请求;
——用户要求实现最小风险状态。
6) 除下列情形以外,不得解除系统控制权:
——已达到最小风险状态;
——驾驶员在执行动态驾驶任务。
7)当用户请求驾驶自动化系统退出时,解除系统控制权,如果存在安全风险可暂缓解除;
f、L5 级驾驶自动化(完全自动驾驶)
L5 级驾驶自动化系统应满足以下要求:
1) 无设计运行条件限制;
2) 激活后执行全部动态驾驶任务;
3) 识别驾驶自动化系统失效和车辆其他系统失效;
4) 在发生下列情形之一时,执行动态驾驶任务接管并自动达到最小风险状态:
——驾驶自动化系统失效或车辆其他系统失效;
——用户未响应接管请求;
——用户要求实现最小风险状态。
5) 除下列情形以外,不得解除系统控制权
——已达到最小风险状态;
——驾驶员在执行动态驾驶任务。
6) 当用户请求驾驶自动化系统退出时,解除系统控制权,如果存在安全风险可暂缓解除;
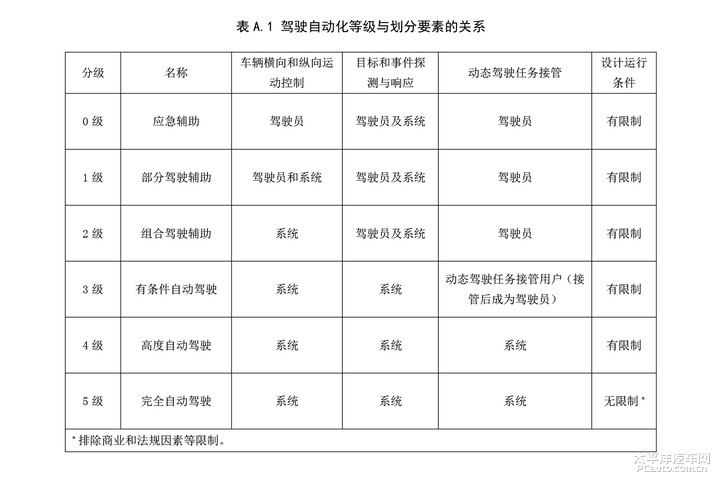
驾驶自动化等级与划分要素的关系
1、驾驶自动化等级与划分要素的关系:
2、在不同的驾驶自动化等级中,用户和驾驶自动化系统在执行动态驾驶任务和动态驾驶任务接管中的角色:
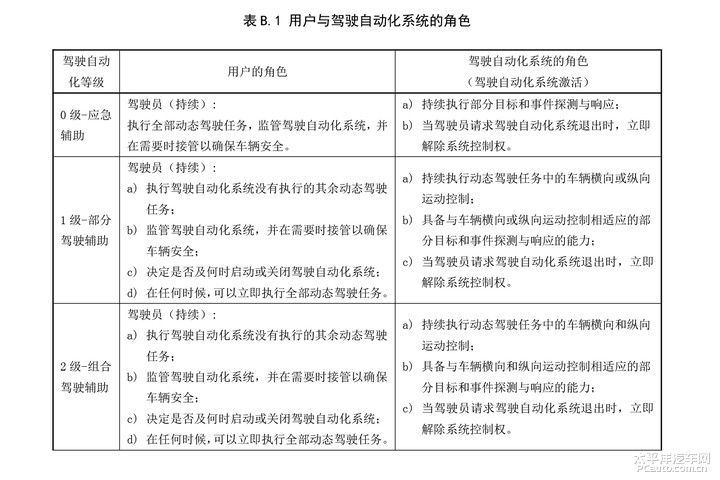
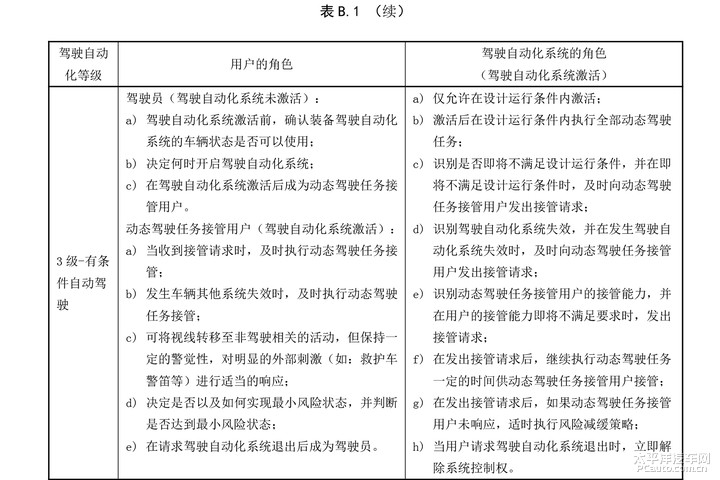
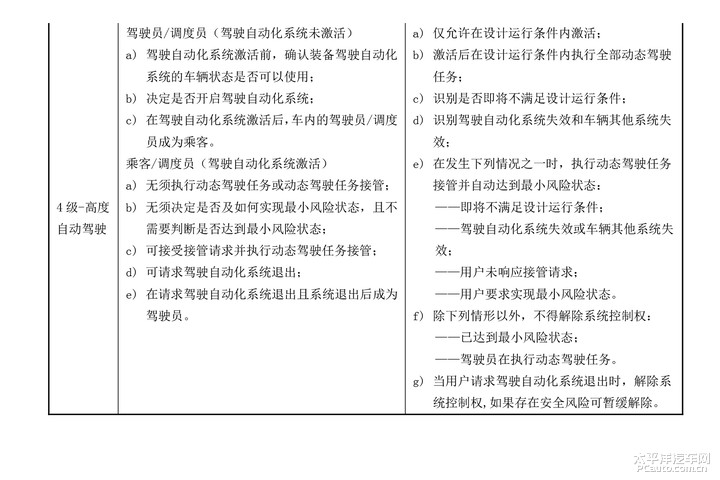
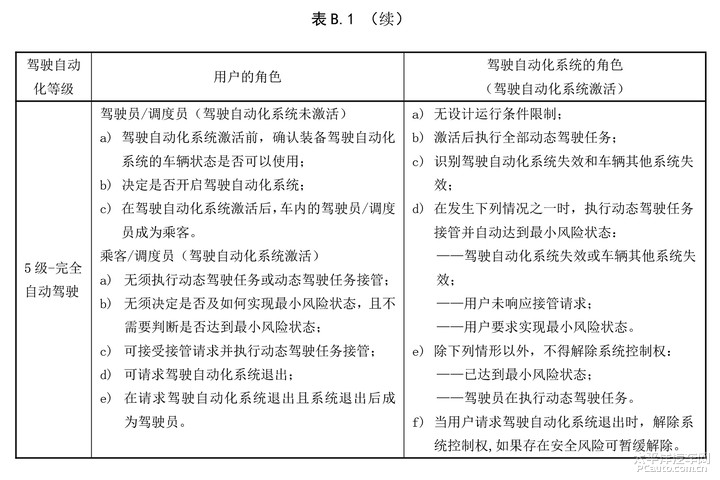
3、不同等级的驾驶自动化系统激活后用户担任的角色: